During my studies at TU-Dresden i’ve been working on these projects below and also developed my favorite robot-project Balancing Robot called MarBot with the great help of the control system department TU-Dresden.
- 12 Nov 2014 » Balancing Robot
updated: 01.10.2016
A balancing robot is a interesting example in field of control system. Marmot-Robot briefly MarBot is a half autonomous robot with 2, 12V DC maxon geared motors with a quadrature encoder and a IMU (Accelerometer + Gyroscope) that can go forward, backward and turn while balancing. It uses 2 multidimensional Kalman-Filter to predict tilt angle of the robot and also the pose (acceleration, velocity, position) of the 2 wheels. I spent the last 3 years working on this project while studying.
As yet i’ve built 6 MarBots. The TU-Dresden as well as the UMIT Hall in Tirol Austria own 2 exemplar of the MarBot as a test station for education purpose.
MarBot in motion:
Parts list:
- 1 x STM32F407 Microcontroller
- 2 x XBee S2B ZigBee Pro 10mW
- 2 x VNH5019 Motor Driver
- 1 x IMU ADXL345 + IMU3000
- 4 x Threaded Rod M3
- 1 x 12V, 3800mAh NiMh Battery-Pack
- 2 x Reely Balloon Tyre
- 3 x Acrylic Glass
- 2 x Maxon Geared Motor with a 2 Channel Quadrature Encoder 9W.
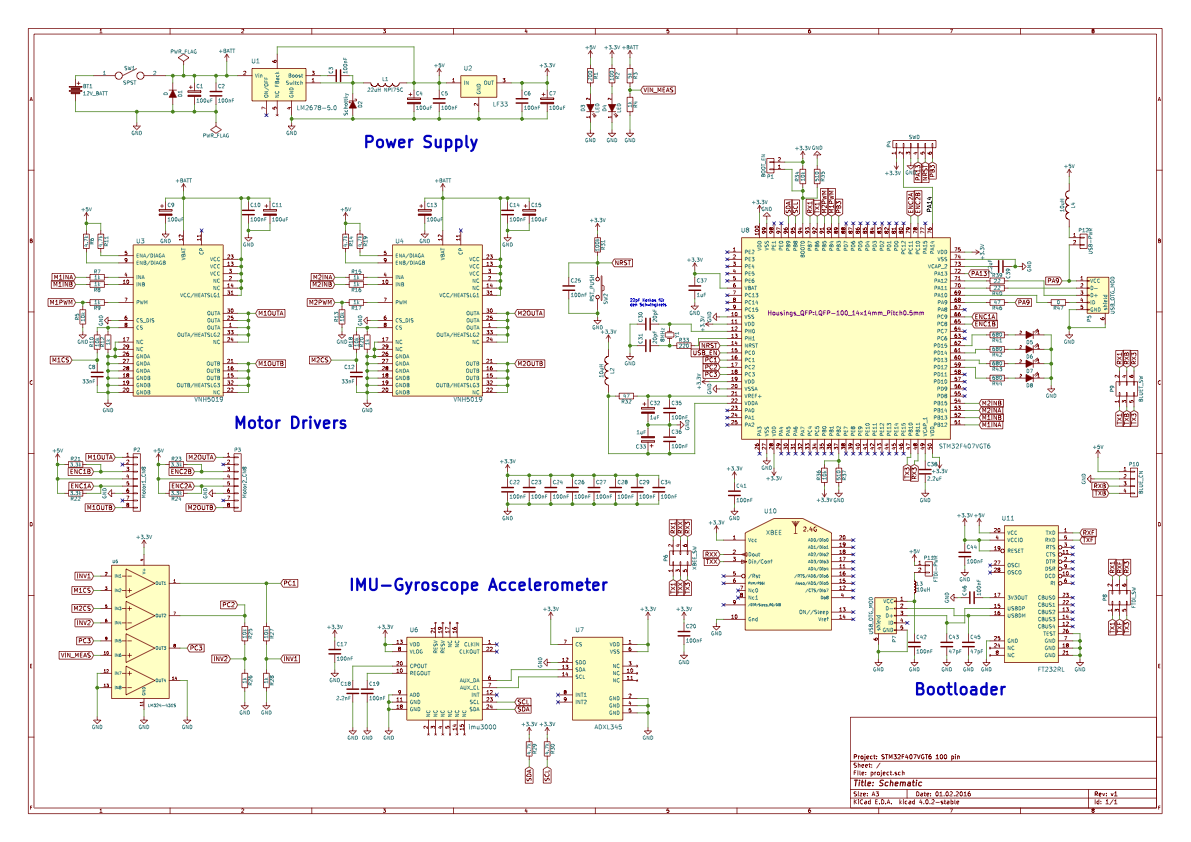
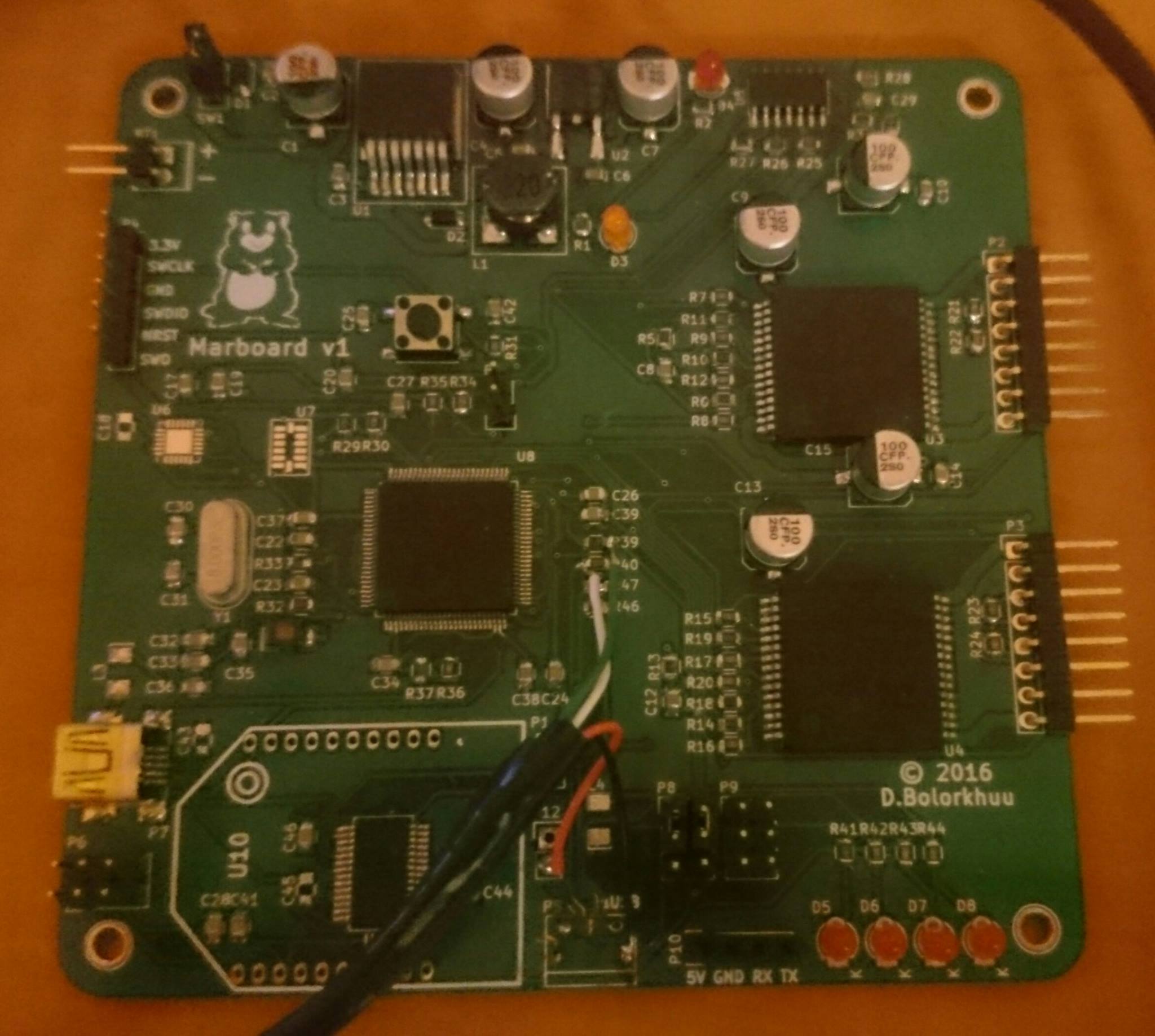
The Controller Motherboard Marboard v0 below is currently being in use on the robot, which is created with KiCad:
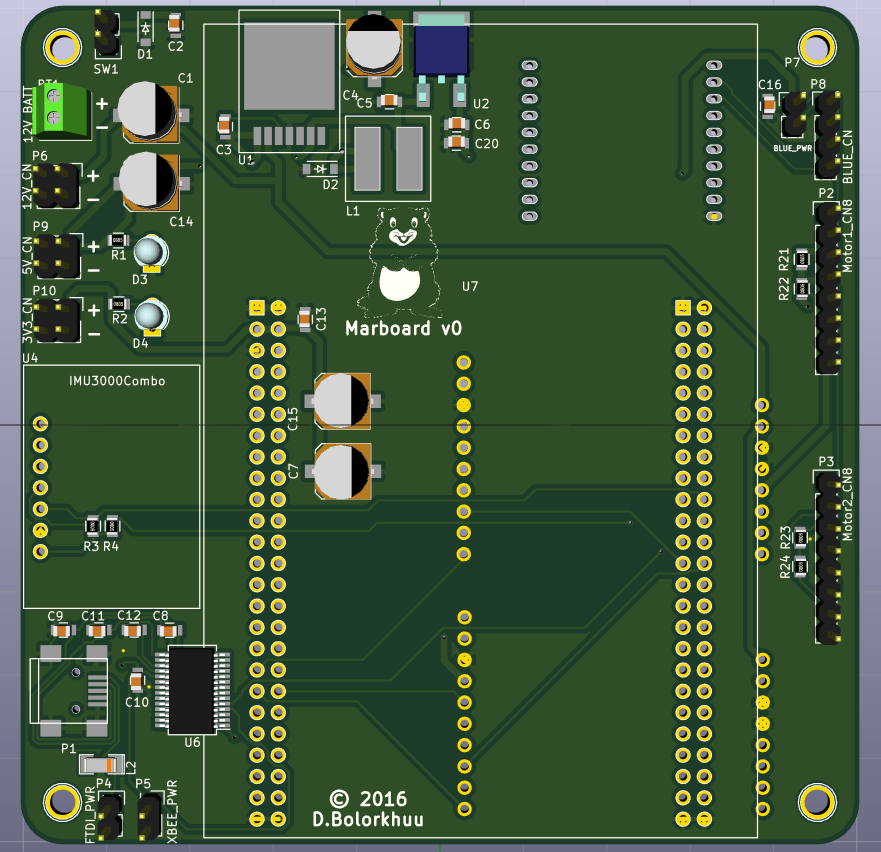
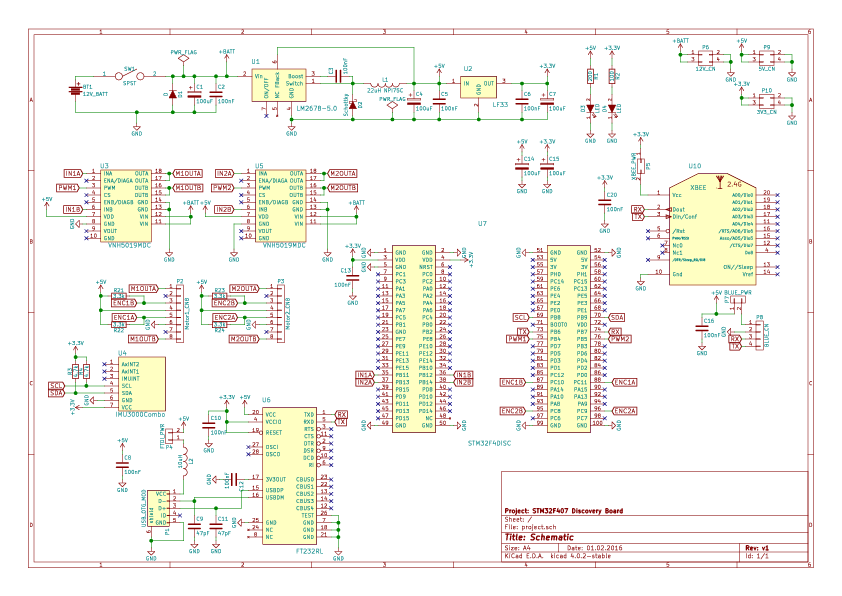
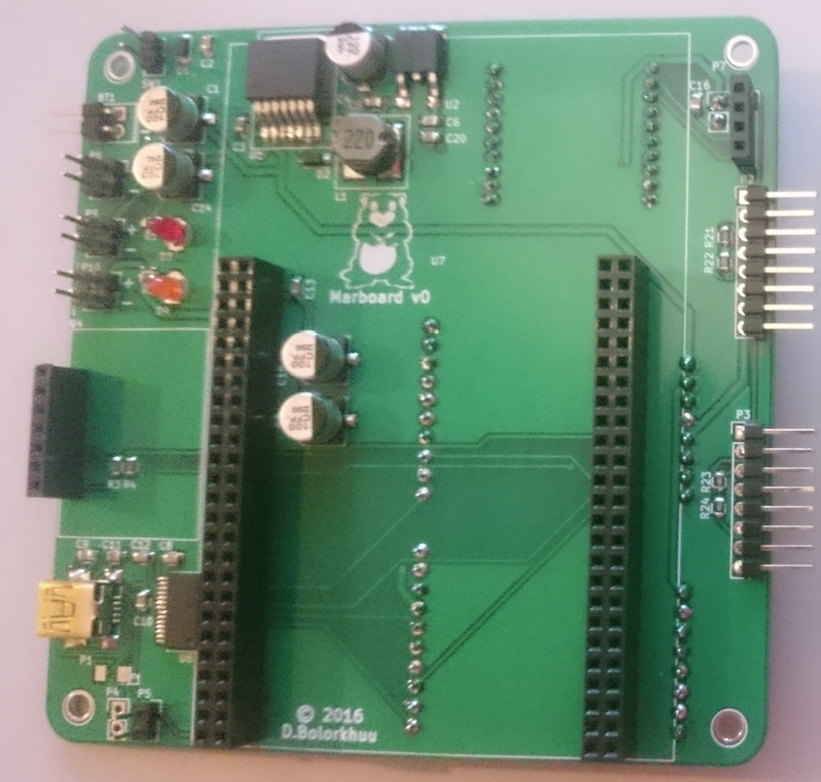
The MarBoard v0 has been further developed and will be replaced soon with MarBoard v1.
State control simulation:
I used python for the kinematic simulation with numpy, sympy and also matplotlib.
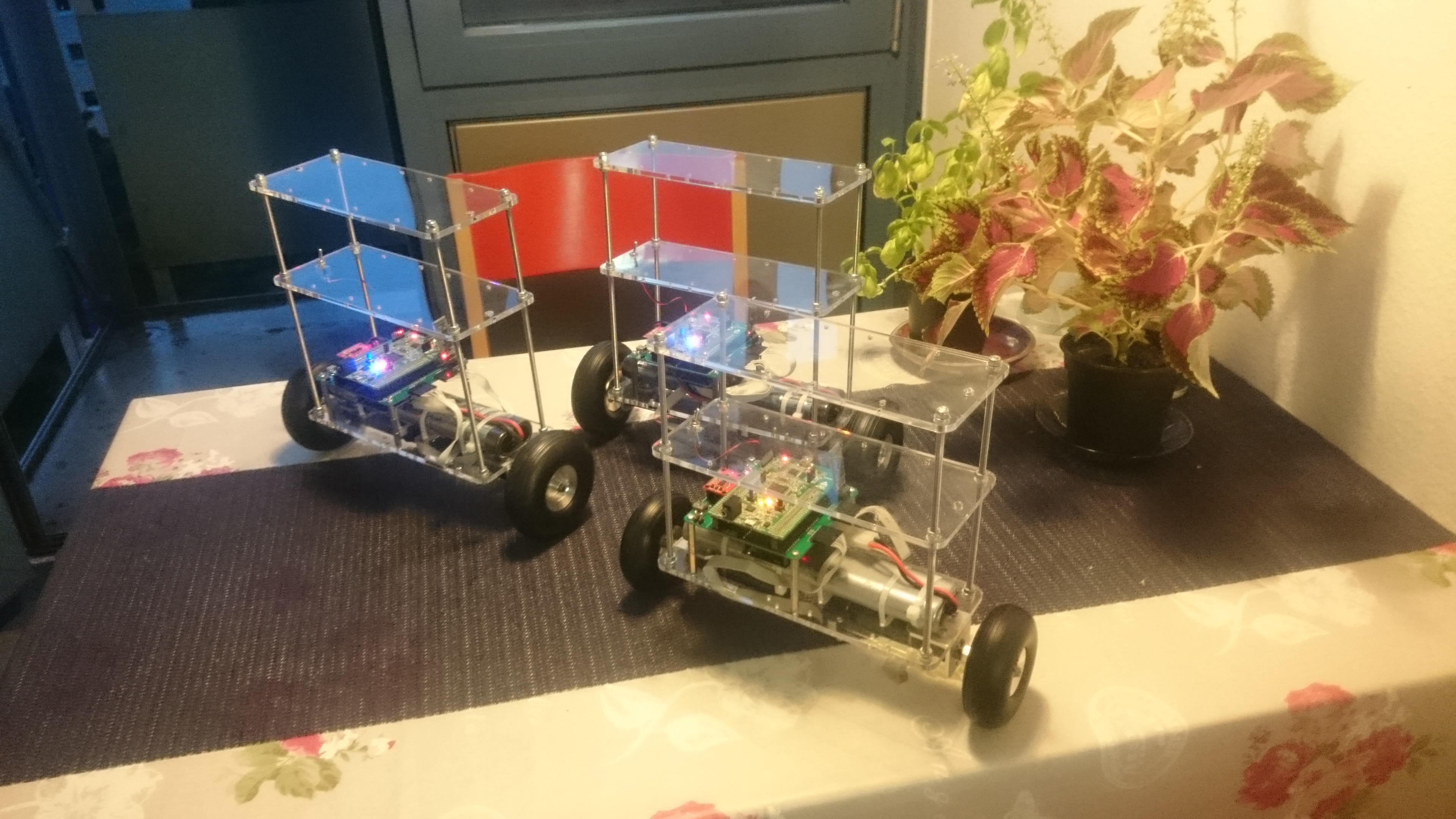
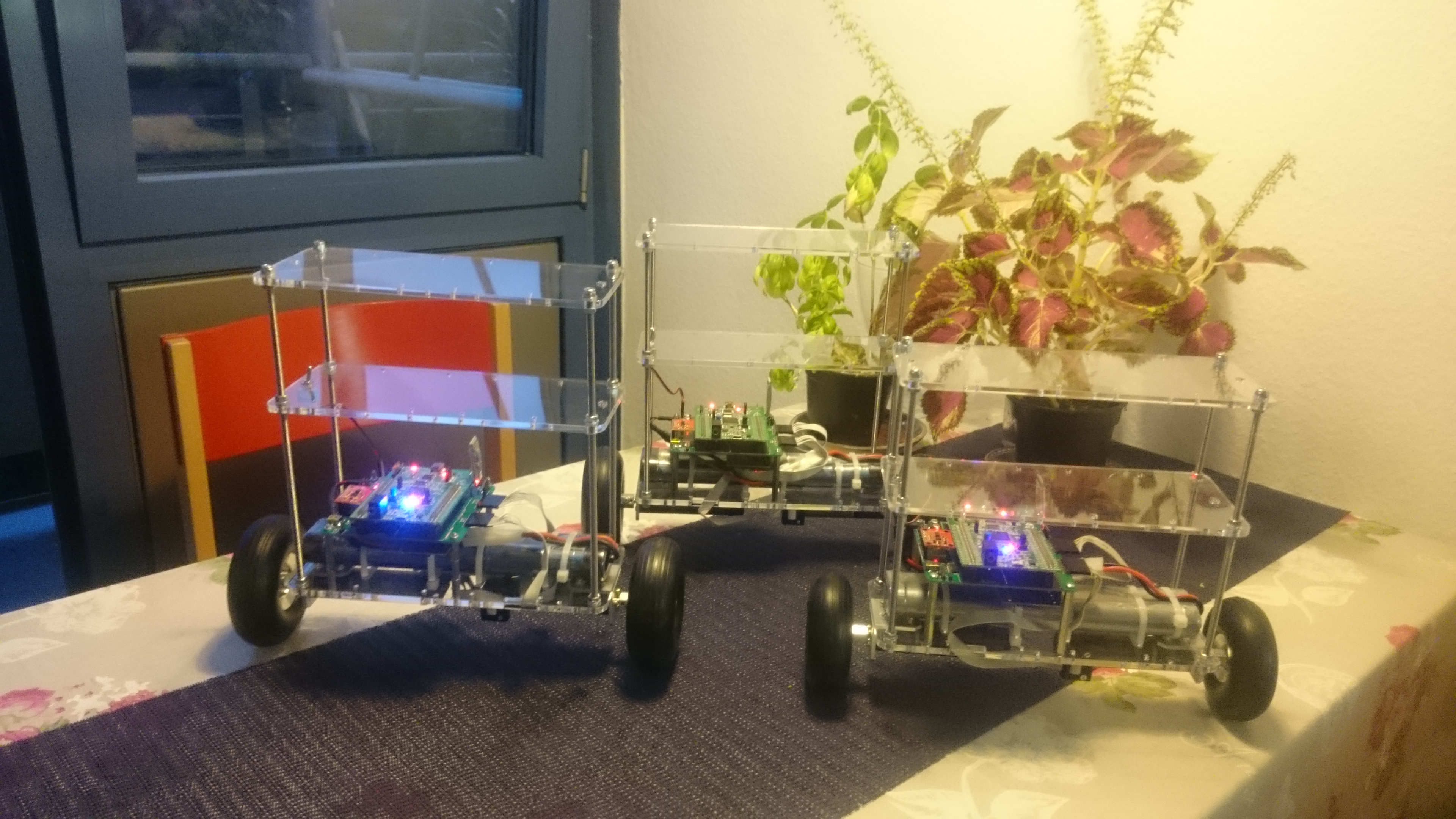
Some pictures of the MarBot:


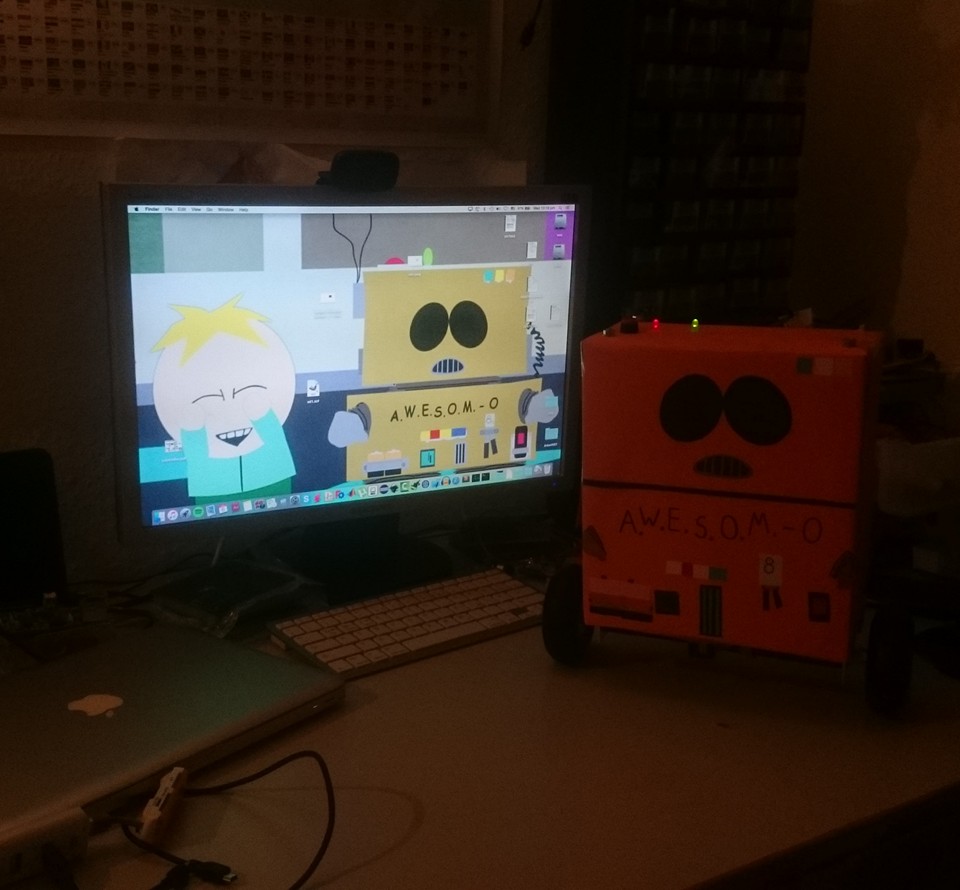
I’m a great fan of South Park. Therefore i’ve put a little suit on MarBot.
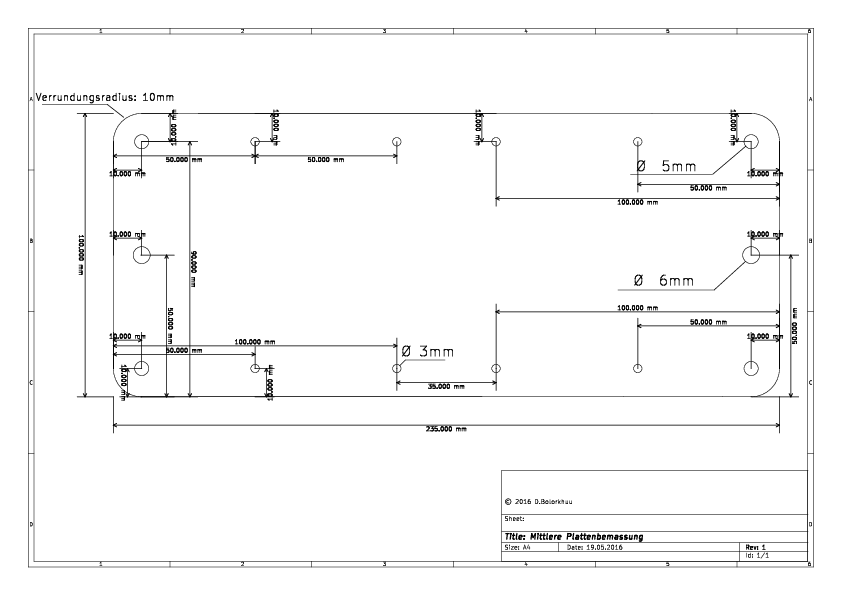
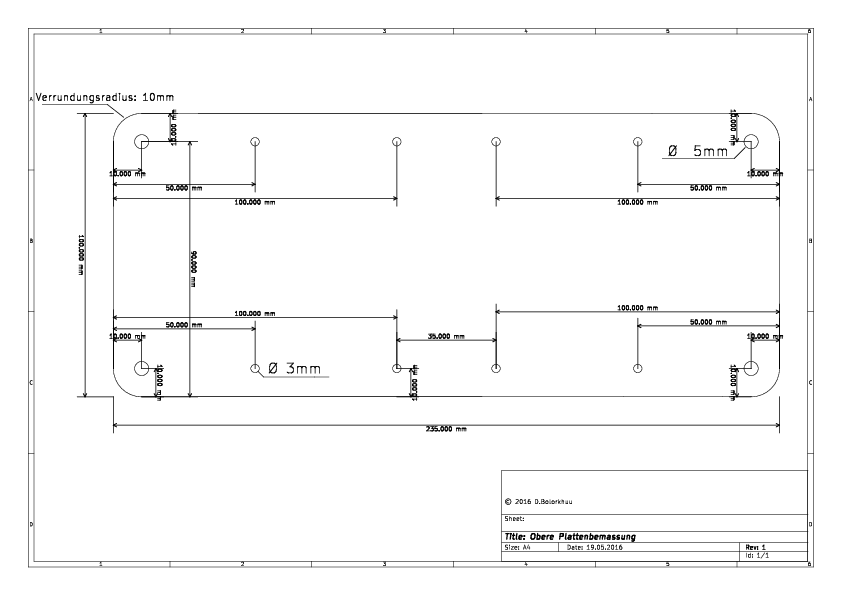
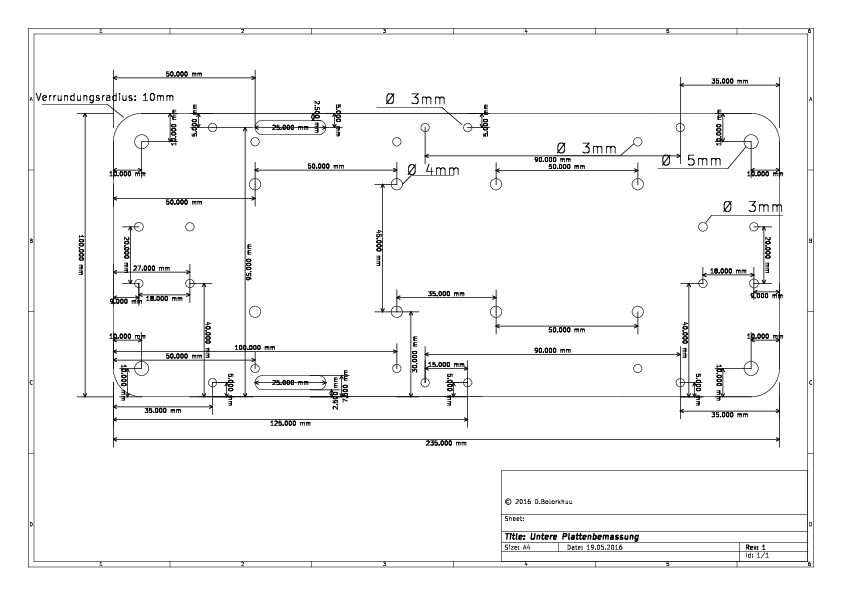
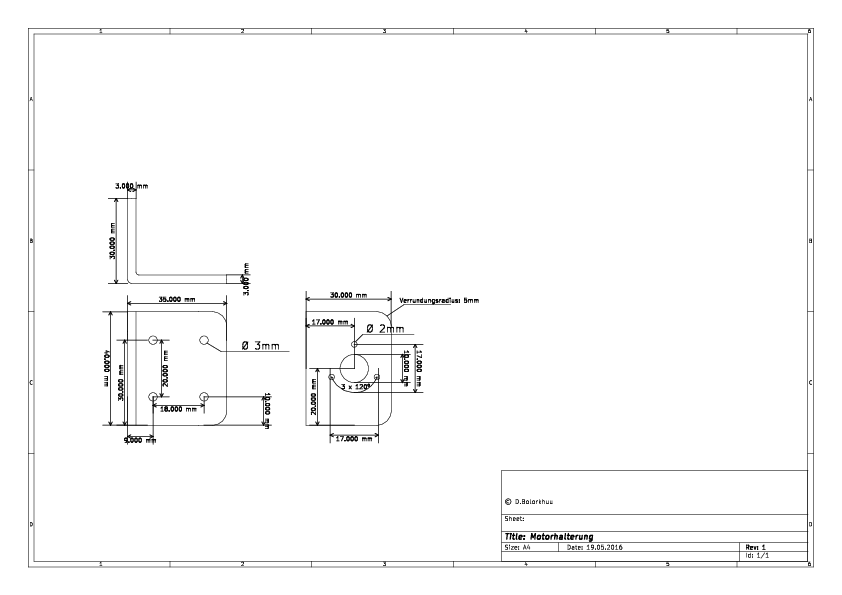
Some technical drawing of the MarBot: